
Deploying scalable AI and real-time robots at ROSCon 24

Gabriel Aguiar Noury
on 9 October 2024
Another year, another ROSCon! This year we’re setting off to Odense, Denmark. At Canonical, we are excited to once again sponsor this event for a community that means so much to us. Just like last year, we are eager for the talks and workshops that, as always, teach us new things and inspire us to push the boundaries of robotics.
We are also thrilled to share with you the work we have done this year, in collaboration with industry leaders like NVIDIA and Bosch Rexroth, at ROSCon 2024. From long-term maintenance of foundational ROS snaps to robotics observability infrastructure and secure AI inference at the edge on certified platforms, we are helping ROS innovators meet industrial requirements.
Here’s a quick overview of what we’ll be showcasing at ROSCon booth 11, featuring our platform partner, Bosch Rexroth, and NVIDIA.
Cybersecurity, observability, and more
Cybersecurity regulations have become a pressing concern for device manufacturers globally. With initiatives like the UK Product Security and Telecommunications Infrastructure, the EU Cyber Resilience Act, and the US IoT Cybersecurity Improvement Act, different markets are implementing new regulations to ensure consumers receive more secure products. This year, we have chosen to focus on securing ROS deployments with Ubuntu. Join us to explore how tools such as ROS foundational snaps, Ubuntu Core, and ROS ESM can benefit developers and enterprises as we adapt to the new regulatory landscape.
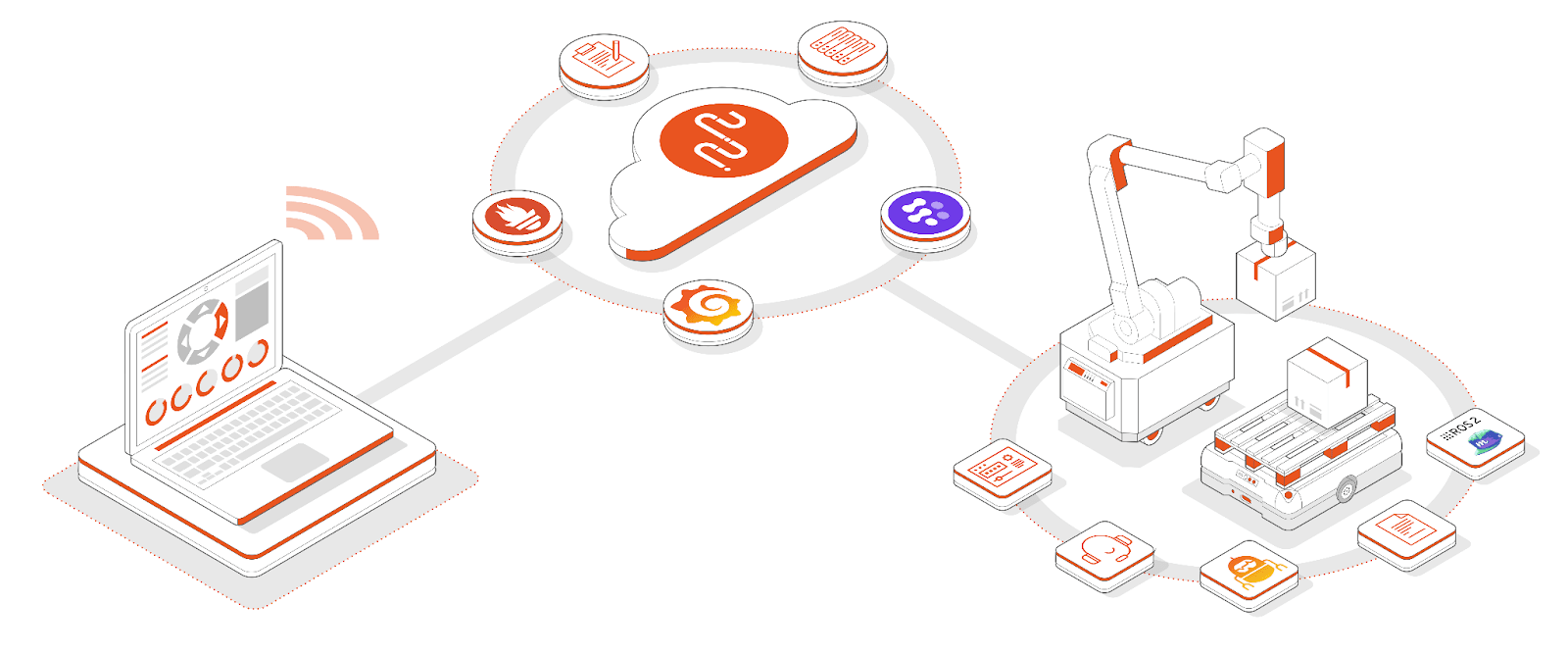
We’re particularly excited to offer an exclusive preview of our robotics observability infrastructure; a lightweight, highly-integrated observability stack running on Kubernetes. The stack provides a customizable portfolio of popular observability apps such as Grafana, Prometheus and Foxglove Studio with direct integration to ROS robots. This platform is designed for assisting sysadmins requiring robotics device monitoring, by offering straightforward deployment and management.
Additionally, we will share the latest updates for Ubuntu 24.04 tailored for robotics developers, enhancements to colcon for isolated, reproducible build/test and release, firmware updates with snaps, and more!
Bosch Rexroth and CtrlX
We’re delighted that our 2024 ROSCon platform partner this year is Bosch Rexroth, the company behind the ctrlX AUTOMATION system. ctrlX AUTOMATION is an open system that provides the building blocks for complete automation solutions via a wide range of industrial controllers.
At ROS Con, they will showcase ctrlX CORE and how the robot controller can be managed and commanded from ROS 2 using their brand new ROS interface. ctrlX CORE provides everything needed to deploy security-compliant solutions. Its real-time operating system, ctrlX OS, is built on top of Ubuntu Core, enabling security features such as strict confinement, FDE, secure boot and more. You can program the applications in nearly all languages, including C++, Go, and Python.
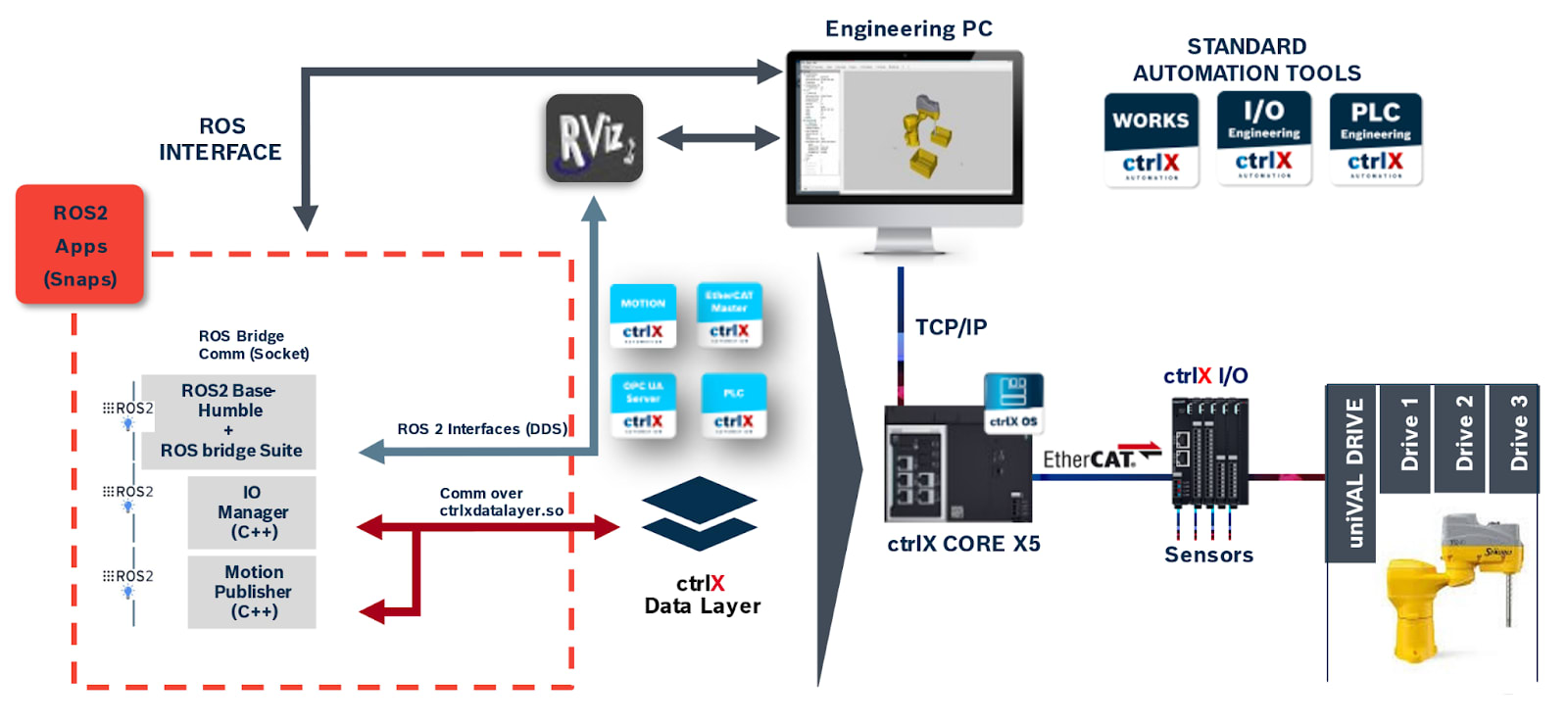
The event offers a chance for you to discover how their SDK offers ROS 2 applications. Learn how you can:
- Run your existing ROS Application as a snap on ctrlX CORE – ctrlX CORE as IPC
- Control Ethercat field devices with ROS 2
- Use ctrlX CORE as a real-time Control platform for your ROS2 Application
ctrlX AUTOMATION is particularly attractive due to its comprehensive portfolio of developer and engineering tools. Developers can leverage a wide range of apps available as snaps through ctrlX Store, including those for PLC functionality.
You can find more information about ROS 2 on ctrlX AUTOMATION here:
Accelerated AI comes to the ROS community with Ubuntu on NVIDIA Jetson
NVIDIA’s Isaac robotics platform, including Isaac ROS, built on ROS 2, is accelerating the growth of the ROS ecosystem. As a leading open-source contributor, NVIDIA partners with businesses and researchers worldwide to advance AI-enabled robotics. This year, we’re expanding on the progress we made last year with the NVIDIA Jetson platform and Isaac ROS.
Visit Canonical’s booth to learn how to deploy secure, high-performance AI applications with edge inference. We’ll showcase the NVIDIA Jetson Orin Nano Developer Kit, running on Canonical’s secure, immutable Ubuntu Core. At the booth, visitors will get to try NanoOWL live, the open-vocabulary OWL-ViT object detection model that we optimized for real-time performance with the NVIDIA TensorRT software development kit and its accompanying ROS2 node. The latest vision transformers, vision and language models, and LLM-powered agents are available from the NVIDIA Jetson AI Lab to experiment with in ROS.
On top of these demos, we’ll highlight our collaborative work using the NVIDIA Jetson platform for edge AI and robotics, including the Jetson AGX Orin, Jetson Orin Nano, and Jetson Orin NX systems-on-modules. These solutions provide ROS developers with a fully certified Ubuntu environment, complete with long-term support, right out of the box. All on the leading platform for robotics and embedded edge AI applications.
Finally, don’t forget to attend these interesting talks from NVIDIA and other partners:
- “Integrating AI in Robot Manipulation Workflows” Birds of a Feather Session on Monday, Oct. 21, with Kalyan Vadrevu from NVIDIA
- “Accelerating Robot Learning at Scale in Simulation” Birds of a Feather Session on Monday, Oct. 21, with Markus Wuensch from NVIDIA
- “ROS in Large-Scale Factory Automation” on Wednesday, Oct. 23, by Michael Gentner from BMW AG and Carsten Braunroth from Siemens AG
- “On Use of Nav2 Docking” on Wednesday, Oct. 23, by Steve Macenski from Open Navigation LLC
For more information, please visit NVIDIA sessions at ROSCon.
See you soon in Odense!
We can’t wait to see you at ROSCon! Join us to explore the latest advancements, connect with fellow innovators, and discover how Ubuntu and our partners are shaping the future of robotics. See you there!


Why is Ubuntu popular with top financial institutions?
Financial institutions are increasingly pressed for agility and velocity to adapt to changing market conditions, increased customer expectations while satisfying regulatory and compliance requirements.
Newsletter signup
Are you building a robot on top of Ubuntu and looking for a partner? Talk to us!

Related posts
TurtleBot3 OpenCR firmware update from a snap
The TurtleBot3 robot is a standard platform robot in the ROS community, and it’s a reference that Canonical knows well, since we’ve used it in our tutorials....
Canonical at CES 2025
CES 2025 is right around the corner, and with over 3,000 exhibitors, it continues to be the world’s premier event for unveiling cutting-edge technology across...
Getting hands-on with AI in automotive
From cloud to edge, hardware-agnostic AI/ML In January Canonical will reconfirm its presence at CES 2025; here we will be showing a cutting-edge AI/ML demo...